Roboterpoliermaschine – Hochpräzise automatisierte Oberflächenbearbeitung





Detailliertes Diagramm
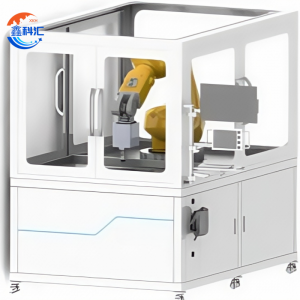

Übersicht über die Roboterpoliermaschine
Die Roboterpoliermaschine ist ein hochentwickeltes, vollautomatisches Oberflächenbearbeitungssystem, das höchsten Ansprüchen in der Präzisionsfertigung gerecht wird. Sie kombiniert eine Sechs-Achs-Robotersteuerung, kraftrückgekoppelte Poliertechnologie und eine Doppelkopfkonfiguration, um eine breite Palette von Materialien und komplexen Geometrien mit außergewöhnlicher Genauigkeit und Konsistenz zu bearbeiten.
Ob für optische Linsen, Luft- und Raumfahrtteile, Präzisionsbauteile oder Halbleiteranwendungen – diese Maschine liefert stabile, wiederholbare und qualitativ hochwertige Oberflächen – selbst bei Toleranzen im Nanometerbereich.


Umfassende Werkstückkompatibilität der Roboterpoliermaschine
Das System unterstützt die Verarbeitung von:
-
Ebene Oberflächenfür Glas-, Keramik- und Metallplatten
-
Zylindrische und konische Formenwie zum Beispiel Rollen, Wellen und Rohre
-
sphärische und asphärische Komponentenfür optische Systeme
-
Freiform- und außermittige Oberflächenmit komplexen Kurven und Übergängen
Seine Vielseitigkeit macht es geeignet fürsowohl Massenproduktion als auch hochpräzise kundenspezifische Fertigung.
Kernmerkmale und Vorteile der Roboterpoliermaschine
1. Technologie mit zwei Polierköpfen
-
Ausgestattet mitEinzelrotationUndSelbstrotationPolierköpfe für mehr Flexibilität.
-
Die Möglichkeit zum schnellen Werkzeugwechsel ermöglicht mehrere Bearbeitungsmodi ohne lange Ausfallzeiten.
-
Ideal zum Umschalten zwischen groben und feinen Polierstufen.
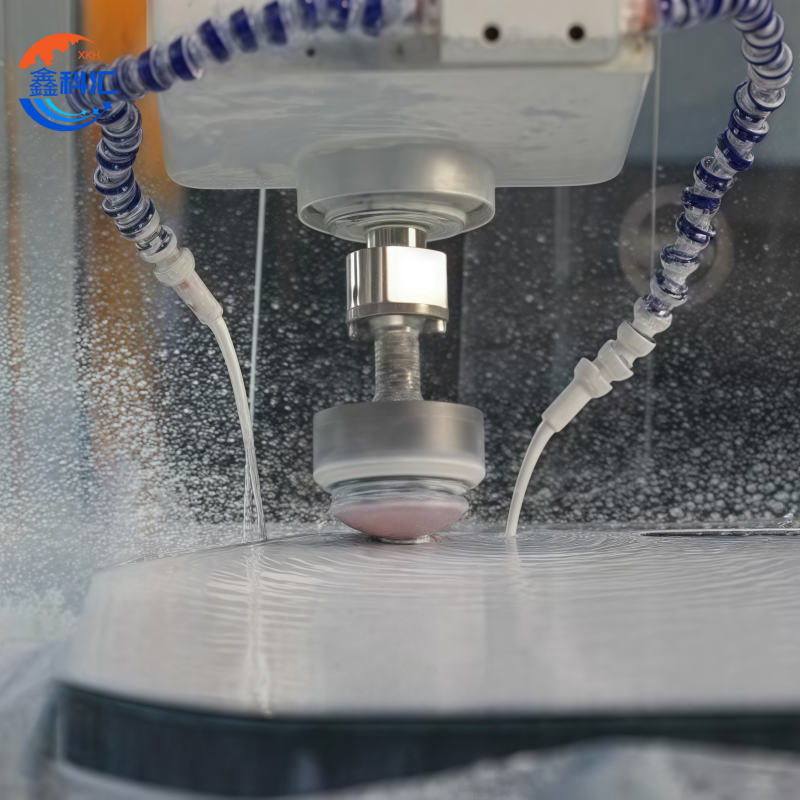
2. Präzisions-Kraftregelungssystem
-
Echtzeitüberwachung vonDruck, Temperatur und Polierflüssigkeitsdurchfluss.
-
Durch gleichmäßige Krafteinwirkung wird eine gleichmäßige Oberflächenbeschaffenheit des Werkstücks gewährleistet.
-
Kann sich automatisch an Oberflächenunebenheiten anpassen.
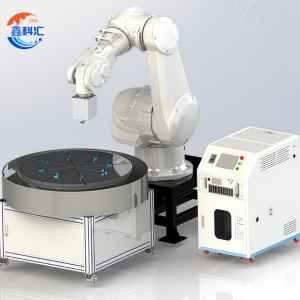
3. Sechsachsige Robotersteuerung
-
Volle Bewegungsfreiheit zur Handhabung komplexer Geometrien.
-
Glatte, präzise Bewegungspfade, berechnet durch fortschrittliche Algorithmen.
-
Hohe Wiederholgenauigkeit der Positionierung von ±0,04 mm bis ±0,1 mm, je nach Modell.
4. Intelligente Automatisierung und Messung
-
Automatische Kalibrierungswerkzeuge für präzise Einrichtung und Ausrichtung.
-
Koordinatenmesssystem für präzise Positionierung.
-
OptionalOnline-Dickenüberwachungzur Echtzeit-Qualitätskontrolle.
5. Verarbeitungsqualität in Industriequalität
-
Die Konstruktion mit zwei Servomotoren erhöht die Poliereffizienz und -stabilität.
-
Die starre mechanische Konstruktion minimiert Vibrationen und gewährleistet eine lange Lebensdauer.

Technische Spezifikationen der Roboterpoliermaschine
| Gerätemodell | Roboterkörper | Wiederholgenauigkeit der Positionierung | Bearbeitungsdurchmesserbereich | Polierkopf mit einfacher Rotation | Mehrfachrotations-Polierkopf | Kleines Werkzeug | Hauptscheiben-Poliertechnik | Kugelkopfpolieren | Schnellwechsel-Ende | Automatisches Kalibrierungswerkzeug | Koordinatenmesskopf | Online-Dickenüberwachung | Numerische Steuerungsplattform |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / voller Messbereich | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / voller Messbereich | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / voller Messbereich | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / voller Messbereich | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / voller Messbereich | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / voller Messbereich | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / voller Messbereich | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Häufig gestellte Fragen – Roboterpoliermaschine
1. Welche Arten von Werkstücken kann die Roboterpoliermaschine bearbeiten?
Unsere Roboterpoliermaschine bearbeitet verschiedenste Formen und Oberflächen, darunter flache, gekrümmte, sphärische, Freiform- und komplexe Konturen. Sie eignet sich für optische Bauteile, Präzisionsformen, Metalloberflächen und andere Anwendungen, die hochpräzise Polierarbeiten erfordern.
2. Worin besteht der Unterschied zwischen Polierköpfen mit einfacher Rotation und solchen mit mehrfacher Rotation?
-
Polierkopf mit einfacher RotationDas Werkzeug rotiert um eine einzige Achse und eignet sich ideal für die Standard-Oberflächenbearbeitung und den schnellen Materialabtrag.
-
Mehrfachrotations-PolierkopfDas Werkzeug kombiniert Rotation mit Eigenrotation (Orbitierung) und ermöglicht so ein gleichmäßigeres Polieren auf gekrümmten und unregelmäßigen Oberflächen.
3. Was ist der maximale Bearbeitungsdurchmesser?
Je nach Modell:
-
Kompakte Modelle (z. B. IRP500S)Φ50–Φ500 mm.
-
Groß angelegte Modelle (z. B. IRP2000AD) verarbeiten bis zuΦ2000mm.
Über uns
XKH ist spezialisiert auf die Entwicklung, Produktion und den Vertrieb von Spezialglas und neuen Kristallmaterialien. Unsere Produkte finden Anwendung in der Optoelektronik, der Unterhaltungselektronik und im Militärbereich. Wir bieten optische Saphirkomponenten, Objektivabdeckungen für Mobiltelefone, Keramik, LT, Siliziumkarbid (SiC), Quarz und Halbleiterkristallwafer an. Dank unserer Expertise und modernster Ausrüstung zeichnen wir uns durch die Fertigung von Sonderanfertigungen aus und streben die Position eines führenden Hightech-Unternehmens für optoelektronische Materialien an.

Verwandte Produkte
-

4H-semi HPSI 2-Zoll-SiC-Substrat-Wafer-Produktion ...
-
Maßgefertigte quadratische Transportbox mit quadratischem Fenster...
-

6-Zoll-HPSI-SiC-Substratwafer aus Siliziumkarbid ...
-

Saphir-Korund für Edelstein Al2O3 Kristall ru...
-

Polieren eines Aluminium-Einkristallsubstrats...
-

Goldbeschichteter Wafer, Saphirwafer, Siliziumwafer...